Robot controllers offer a few types of interpolated motion: joint, linear, circular (and I newer models also a spline). Differences between them are quite easy to understand, but the human eye is often too slow to notice the difference during performing path on a real robot.


Check the best Industrial robots book
“Everything you need to know about Robotics from beginner to expert!”
“Terms like Kinematics and Forward/Inverse kinematics sound complicated while in this book they are describe in such a way that a child can understand it.”
“Highly recommended.”
Robotic Painting with Light
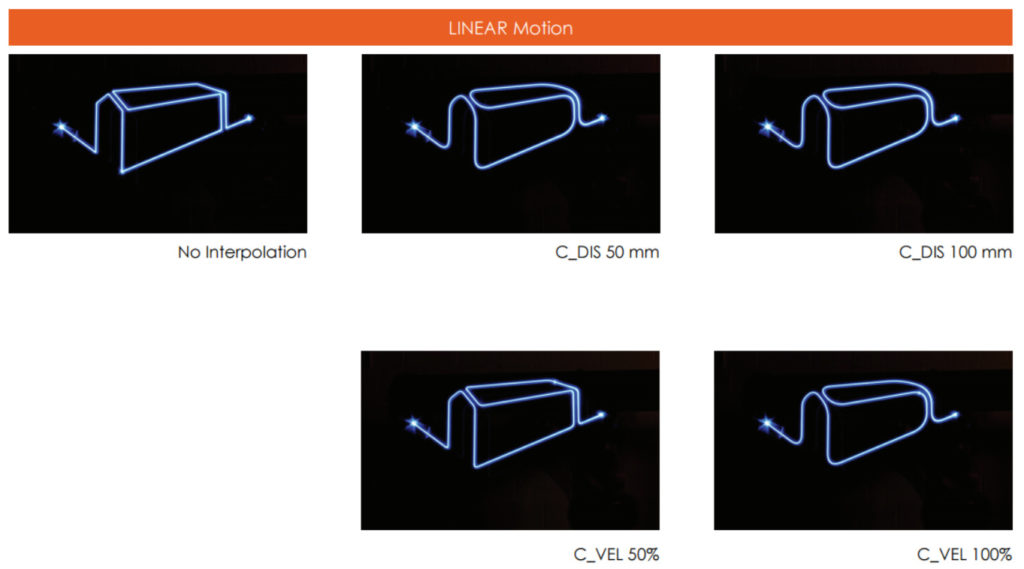
Students at Taubmann College did a great job to visualise how different parameters change the trajectory of a robot’s motion: point-to-point (PTP), linear (LIN), circular (CIR), and spline (SPL).
They also documented differences in motion related with KUKAKUKA is a manufacturer of industrial robots and solutions for factory automation. The KUKA Robotics Corporation has 25 subsidiaries worldwide, mostly sales and service subsidiaries, including in the United States,… More C_PTP, C_DIS, C_VEL, and C_ORI approximation settings. You can see the differences in the picture below.
Light painting is a great and simple idea to help understand how the robot works. You can learn more about this experiment here.